
































永宏plc在杯子制造機械手方面的plc控制系統
1、行業介紹
一次性塑料杯碗在20世紀70年代末開始廣泛傳播,隨著其使用方便、衛生保健等特點,永宏plc在餐飲業中的地位越來越重要。目前,塑料杯、碗廣泛應用于飲料店、冷熱飲料店、茶店、賓館、飯店、咖啡店等,為外賣飲料和現場使用提供各種塑料杯。
隨著我國經濟的不斷發展和科學技術的迅速發展,該設備廣泛應用于一次性塑料杯的自動制杯操作。可從一次性塑料杯成型機中快速取出并堆疊至設定的編號。提高生產效率,節約勞動成本,降低勞動強度,改善生產環境。
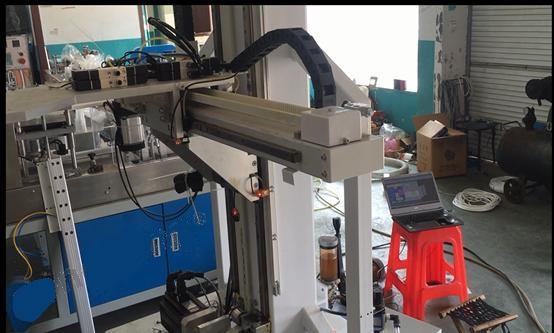
工作原理:拔罐機帶杯機器人通過伺服電機執行XY軸控制臂進入成型機模具,通過真空發生器吸塑料杯,將其取出并堆放在輸送機上皮帶通過設定參數,并通過傳送帶,轉移到包裝機進行包裝。

2、系統設計方案
2.1計劃背景
拔罐機是根據傳統的手動拾取和堆疊塑料杯開發的全自動杯堆疊裝置。與堆疊杯的手動操作相比,自動拔罐機器人更快,堆疊精度更高。沒有人工接觸更衛生。自動拔罐機采用機器人控制,采用plc制系統。 PLC不僅可以滿足客戶的控制要求,而且具有良好的系統穩定性和高機動性。本文在拔罐機在制杯機中的應用背景下,詳細描述和介紹了永紅PLC的硬件設計,軟件設計和實現結果(應用效果)。
2.2客戶需求
根據機械結構和工藝要求,客戶具有以下功能。首先,它可以手動控制步進電機,氣缸等。有模擬啟動和單獨停止功能。 HMI顯示當前機器人運行狀態和主機的當前角度顯示。總而言之,制杯機的拔罐機需要很好地滿足各種控制要求,并且還需要達到各種工藝要求。
3、硬件配置
機器人制杯機需要控制2個伺服電機、1個變頻器和多個氣缸,因此,一臺永宏plc FBs-40MCT2用作整個設備的plc控制系統;一個FBs-B2DA(模擬板)用于控制PLC到變頻器的頻率;上位機使用HMI觸摸屏界面進行數據監控和參數設置。 。運動控制使用伺服驅動器和電機,逆變器和電機;其他執行器使用氣缸,普通電機等;檢測單元使用編碼器和接近開關,整個配置解決方案可以幫助客戶節省大量系統成本,整個配置解決方案可以幫助客戶節省大量系統成本。

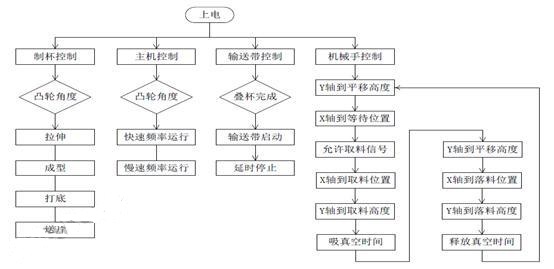
4、工藝流程
拔罐機拔罐機器人的過程主要分為四個過程:機器人控制,輸送帶控制,主機控制和杯控制,還有具有報警功能。
機器人控制:XY軸伺服電機執行杯形拔罐動作。
傳送帶控制:轉移堆疊的塑料杯。
永宏plc控制:控制變頻器的啟動、停止和控制頻率增加和減少。
結論
永宏plc通過現場調試,拔罐機器人組裝機具有結構簡單,操作簡單,維護方便,生產效率高,生產質量高的優點。設備的運行效率為2-3s /板,設備運行期間運行。穩定,生產效率高;它可以提高生產效率,降低勞動強度,節省勞動力成本,改善客戶的生產環境。該裝置已廣泛應用于一次性塑料杯領域,具有速度快,精度高,穩定性高,適用性強等特點,已得到越來越多客戶的認可。
標題:永宏plc在杯子制造機械手方面的plc控制系統 地址:http://m.511997.cn/gongsi/3494.html



和MMC卡6ES7953-8LF11-0AA0的用途")







